
Playing with Dangerous Weapons,
a record of honours progress.
By Courtney Pitcher
Project
Problem
Electronic, automated rifle target scoring systems have not experienced widespread deployment within the sport of competitive rifle shooting. There are many reasons for this, chief among these reasons are: Commercial systems are incredibly expensive, costing far outside of the price range that the average rifle club could afford. Cheaper systems do exist, but do not provide the level of accuracy and reliability necessary to replace a human scorer.
Computer Vision has not been adequately explored as a primary means to score rifle targets. Reliable commercial systems obtain a shot's position either by using a LASER matrix or using an array of microphones to triangulate the position.
Solution
A webcam will be place in front of the target, the webcam will be connected to a raspberry pi running opencv. The system should be able to find the target in space, estimate its orientation, then it should then be able to detect when a shot occurs and score the shot.
Goals
The following are the goals of my project, in order of importance:
- Score a target with a high level of accuracy, precision and repeatability.
- Produce results with a precision of < 0.5mm.
- Require two or less webcams per target.
- Be able to position the cameras at almost any angle.
Process
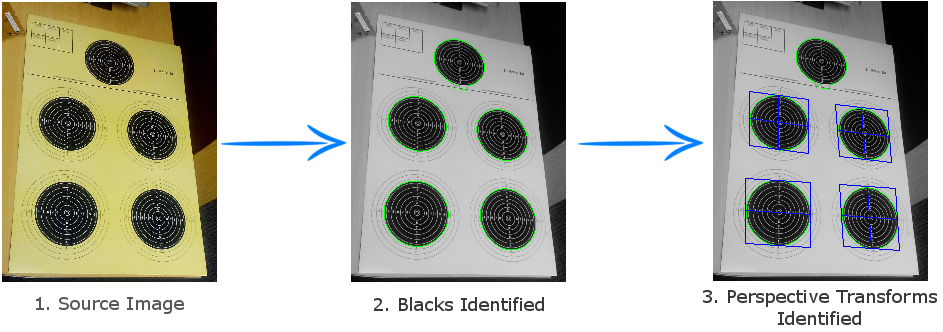
- The source image.
- Identify contours with significant change in contrast, then apply the following weak classifiers:
Contour is roughly circular in shape.
Contour is in an acceptable size range
Contours are all roughly the same size (if more than 5 are found).
Contours are in roughly the correct possition. - For each of the "blacks", try and identify its perspective transform, the following weak classifiers are used:
Find the lines that connect this target to its adjacent two targets.
Find the lines that best fit the verticle and horizontal target numbers.
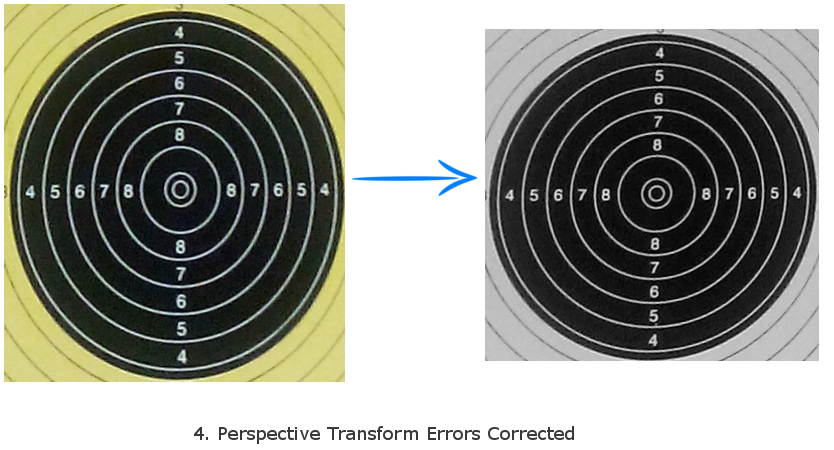
- Apply the transform matrix, identify percent error and scale the transform matrix accordingly.
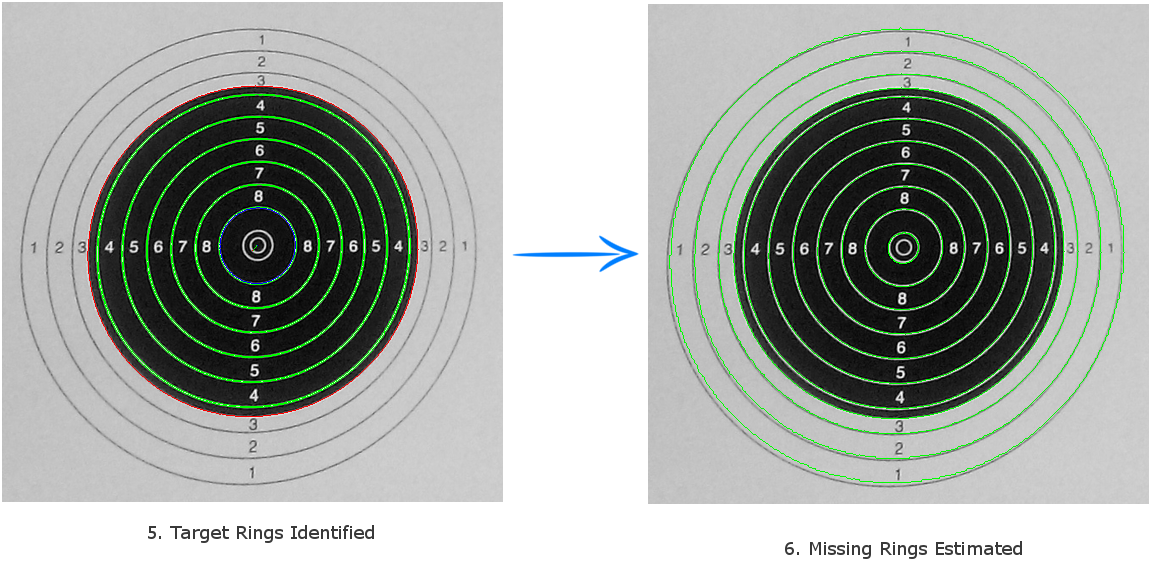
- Look for contours that could be target rings.
- Assume where the missing rings should be.
- Calibration is complete, save transform matrix and ring locations for each target.
Other work I've completed this year
The Rhodes University BioTechnology Department required a cellphone application to take a photo of a CD4 count test, process the image and find the CD4 count from the colour of a chemical indicator.
About Me

Reading for my honours in Coputer Science.
Contact
Leave your details below if you'd like to get a hold of me.