The Wii3D Project Background
Vision-Based Interaction
Gunnar Grape presented a system for computer vision which maps a hierarchy of features using a two dimensional prototype. The prototype models that were used were various projections of the three dimensional objects as a camera views them from a several different locations. The items in the scenes were limited to planar faced, convex objects. The objects that are recognized are then matched to generalizations of the prototype models. This paper deals with many of the concepts of two dimensional vision-based interaction.
Stereoscopic Depth Perception
The ability of an organism to perceive depth is achieved using the composition of multiple perspectives of the same scene. Human vision has two perspectives that are processed by the brain to resolve an estimate of the third dimension, which is important, but not essential, to a human's function. Since the mid twentieth century, researchers have documented investigations into depth perception and judgments of distances in the real world.
- Vision-Based Interaction

- Stereoscopic Depth Perception

- Triangulation

- Point Tracking

The stereoscopic depth perception problem is solved by deriving the points in three dimensional space relative to some predefined point in the space. In the world of computer vision, the methods for resolving points using stereo vision are:
- Production of a camera model: the position and orientation of cameras in three dimensional space
- Position of matching point pairs: loci of corresponding features in the two pictures
- Computation of the point in three dimensional space for each point pair
- Presentation of the resultant depth information
A great deal of research into matching areas in stereo images has been done. Marsha Hannah discusses measures of match which are suitable for the stereo vision matching of areas. She goes on to describe several methods for pruning the search space.
Triangulation
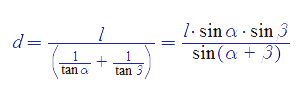
The linear triangulation of a point in three dimensional space from two projections, whose views are known, is simple in a non-noisy environment using geometry.
Matching Point Pairs
Hannah described several ways to find the loci of two corresponding features in the stereo images. In the event of few similar features in each image, it is sufficient to simply do a permutation of pairwise operations on the points and choosing the pairs based on the minimization of the distance between the corresponding points.
Point Tracking
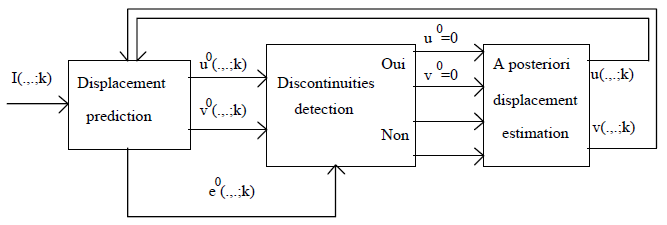
A study by Tziritas shows methods of predictive interpolation by estimating the motion and structure of three dimensional objects from a sequence of images. The study discusses the estimation by using a recursive predictor based on the velocity vectors of a point in the three dimensional space. This predictor is based on a mixture of the previous velocities of the point in question.
In another paper, Tziritas goes on to investigate the problem of discontinuity detector which deals with occlusion and algorithmic discontinuities. This detection is attained by checking the errors between the predicted values and the observed values. The detection of such a discontinuity error results in the resetting of the system to start tracking the points from a newly initialized state. The point tracking system is summarized in below.