The Wii3D Project System
Hardware
The Wii3D System hardware configuration included:
- Two Nintendo Wii Remotes
- A Personal Computer with Bluetooth Capabilities
- WiiGloves
Nintendo Wii Remotes
Layout
When designing the proposed layouts of the Nintendo Wii Remotes, several factors were considered:
- Maximization of volume where the infra-red sources would be detected
- Efficiency of stereoscopic triangulation algorithm implemented
- Minimization of error introduced using a particular stereoscopic triangulation algorithm
It is evident from the diagram below that in order to maximize the volume, the Wii Remotes need to be as close together as possible. The increased volume where infra-red sources are detected enables the user to have a larger space in which to interact with the system.
- Hardware

- Wronski Glove

- Concept System

 |
 |
The efficiency of an algorithm where the cameras are not aligned is decreased substantially. While the volumes of the two arrangements below are similar, the triangulation algorithm for the non-parallel arrangement is not as efficient as that of the parallel arrangement.
|
 |
Camera Properties
The Wii Remote camera's intrinsic properties were measured:
- The horizontal and vertical fields of view of the Wii Remote's camera
- The limits of the x and y coordinates reported by the Wii Remote
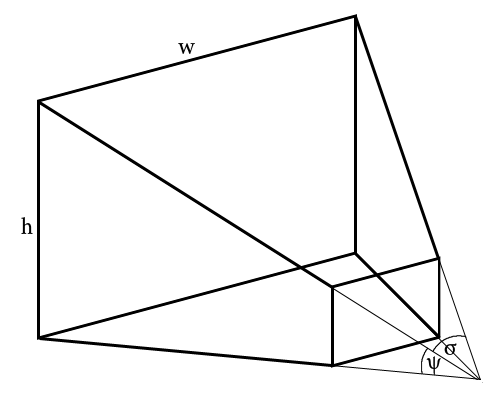
The horizontal field of view, \sigma, was found to be 41º, and vertical field of view, \psi, was found to be 31º. These measurements were in agreement with the experiment conducted in the paper entitled, "Design and Implementation of a Hand Tracking Interface using the Nintendo Wii Remote". For each point, the reported x and y coordinates range from 0 to 1023 and 0 to 767 respectively, and the Wii Remote can track up to four of these points at a frequency of 100Hz.
Personal Computer with Bluetooth Capabilities
A personal computer supporting Windows 7 was used for this research. The computer had a Bluetooth dongle that supported the Bluetooth Human Interface Device profile.
WiiGloves
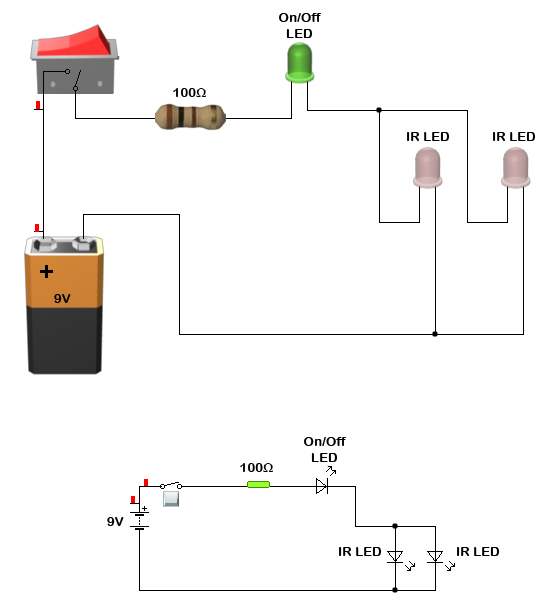
The WiiGloves are custom-made components for use with the Wii3D system. These gloves house the infra-red sources that the Nintendo Wii Remotes track in order to triangulate each source's coordinates in space. The circuit for each glove is constructed from the following electronic components:
- 1 100Ω Resistor
- 1 Green LED
- 2 Infra-red LEDs
- 1 On/Off Switch
- 1 9V Battery
Ensuring that the current is not too high for the LEDs, the circuit was constructed as shown below.
There are two different configurations for the WiiGlove:
- Two hands with one two infra-red sources on each hand (thumbs and index fingers)
- One hand with four infra-red sources on the thumb, index finger, middle finger and ring finger
The different configurations would give the user more freedom in terms of the way that they perform the different gestures.