Computer Science Honours Research
Integrating Real-time Image Processing
into Rapid Prototype Robotics
Conducted by Jean-Clive 'JC' Bailey
Supervised by James Connan
Development
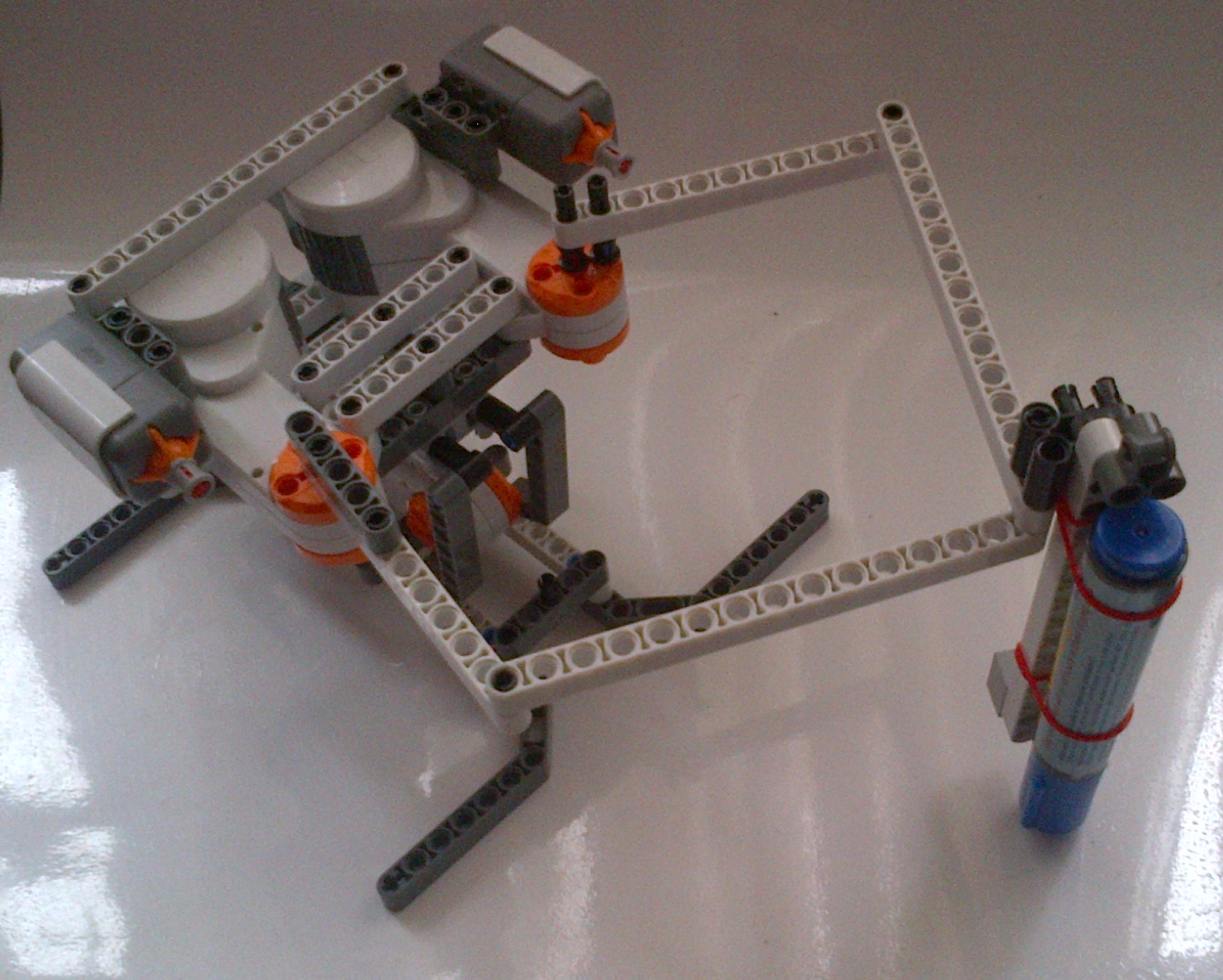
Plot Clock Alpha
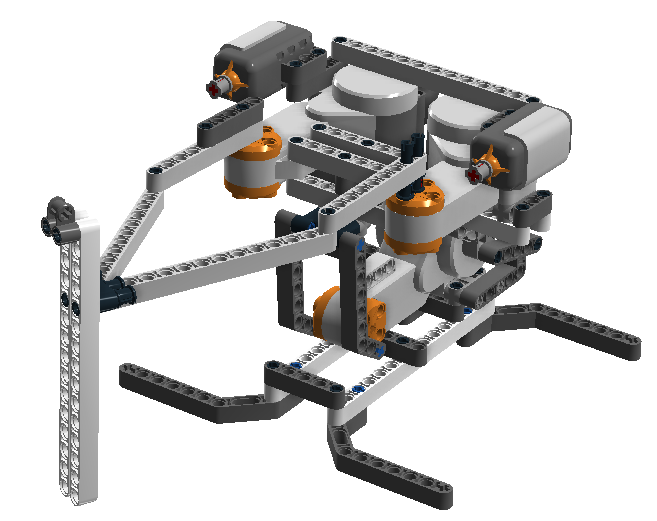
Calibration Test
This simple maneuver moves each arm of the PlotClock exactly 90 degrees from the origin angle, bumps a touch sensor to reset its internal angle and then moves to its origin position. This is a key action, since it allows the arms to start from nearly any starting position and then calibrate to a known baseline position.
Initial Test
My first attempt to producing a digit from a fixed position. It performed quite admirably for the first first plot, but distinctly drew an unwanted line from the origin position to top left start of the two.
Mapping digit positions
The next step is laying out exactly where each digit will be drawn. This took quite a few attempts to get correct, since there was some discrepancy between the origin position and the scaled digit locations. Took a few hours to correct, but the end result is remarked improvement. Notice I added a Pen up and Pen down feature to mitigate unwanted lines too!
Writing the time!
After I mapped each digit from 0 to 9 I simply had to scale it using a fixed value and then make the arms move to each position in segmented chunks. I am starting to see the limitations of affixing the arms directly to the NXT servos now... the residual jitter causes the pen to jerk when it moves along the Y-axis of the grid. I have a feeling that I will need to redesign exactly how the robot moves or implement something to make the relative motor angle less inaccurate. Fetching the time and mapping into a HH:MM format was trivial.
Considering the next step
 Upon evaluation and review, there a few key limitations I will need to address the next version (Beta).
Upon evaluation and review, there a few key limitations I will need to address the next version (Beta).